












اتوماسیون جنوب نماینده و توزیع کننده انواع محصولات اتونیکس می باشد .انکودر چرخشی مطلق اتونیکس (Absolute) مدل شفت دار قطر 50mm میلیمتری . ولتاژ وردی 5-24 V/DC و دارای کد های خروجی مختلف BCD,binary,Gray دارای ذقت اندازه گیری 1024 . و درجه خفاظت IP64 مطابق استاندارد IEC









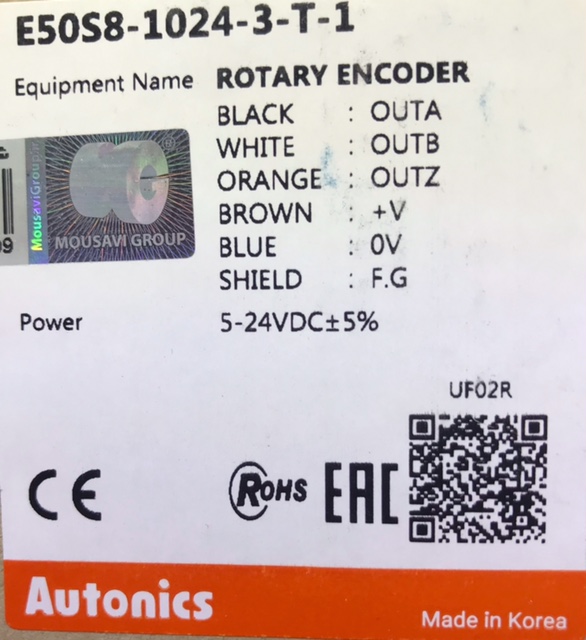
نقد و بررسی انکودر نوری افزایشی آتونیکس مدل E50S8-1024-3-T-1 ساخت کره جنوبی
انکودر نوری آتونیکس مدل E50S8-1024-3-T-1
Shaft outer diameterMax. response frequencyMax. allowable revolutionStarting torqueResolutionOutput phaseControl outputPower supplyConnection typeProtection structureApprovalEnvironment_Ambient temperatureEnvironment_Ambient humidityAccessoriesWeight
| Ø8mm |
| 300kHz |
| 5000rpm |
| Max. 70gf.cm(max. 0.00686N.m) |
| 1024P/R |
| A, B, Z |
| Totem pole |
12-24VDC  ±5%(ripple P-P: max. 5%) ±5%(ripple P-P: max. 5%) |
| Axial cable type |
| IP50 |
 |
| -10 to 70℃, storage: -25 to 85℃ |
| 35 to 85% RH, storage: 35 to 90% RH |
| Ø8mm coupling, Bracket |
| Approx. 363g(approx. 275g) |
انکودر چیست :
انکودر ها برای ترجمه حرکت چرخشی یا خطی به سیگنال دیجیتال استفاده می شوند. معمولا این کار به منظور نظارت و یا حرکت کنترل پارامترهایی مانند سرعت، جهت، فاصله و یا موقعیت انجام می شود.
انکودر موتور ، یک انکودر دوار میباشد و به یک موتور الکتریکی متصل شده است که سیگنال های بازخورد closed loop را با ردیابی سرعت و یا موقعیت شفت موتور فراهم می نماید.
انکودر ها به دو نوع Incremental (افزایشی) و یا Absolute تقسیم میشوند.
-انکودر incremental : این نوع انکودر به منظور کنترل سرعت شفت موتور استفاده میشود.
انکودر های incremental بازخورد و سرعت عالی را فراهم مینمایند و از آنجائیکه تعدادی سنسور در آن در گیر هستند ، سیستم هم ساده و هم ارزان است. یک انکودر incremental تنها با ارائه اطلاعات تغییر یافته ، محدود می گردد ، بنابراین این انکودر به یک دستگاه مرجع (reference devce) برای محاسبه حرکت نیازدارد.
-انکودر absolute : این نوع انکودر به منظور نشان دادن حرکت و موقعیت شفت موتور میباشد. از این انکودر در مواردی بر روی سروو موتور استفاده می شود که دقت موقعیت یابی مد نظر است.
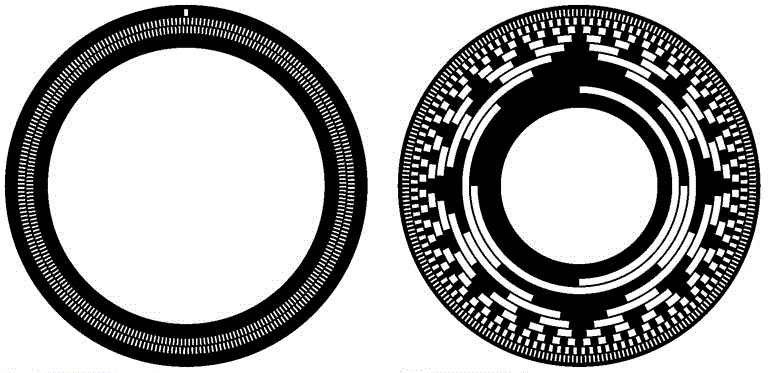
یک انکودر چرخشی absolute موقعیت خود را با استفاده از نقطه رفرنس تعیین می نماید. این روش بسته به اینکه آیا انکودر چرخشی absolute نوری و یا مغناطیسی است ، کمی متفاوت میباشد. اما اصل در هر دو حالت یکسان است. دو دیسک وجود دارد ، هر دو با حلقه های متحدالمرکز . یک دیسک به محور مرکزی متصل است و دیگری آزادانه حرکت می کند. همانطور که دیسک می چرخد نشانگر ها در امتداد مسیر انکودر absolute ، موقعیت روی دیسک ثابت را تغییر میدهند. هر پیکربندی در امتداد دیسک انکودر ، کد باینری منحصر به فردی است. نگاهی به کد باینری درون انکودر ، موقعیت مطلق شئ را تعیین میکند. برای انکودر های مطلق نوری ، نشانگر از طریق نور عمل میکند. برای انکودر های مطلق مغناطیسی (magnetic) نشانگر ها یک ردیف از سنسورهای مغناطیسی هستند که از یک آهنریا عبور میکنند و موقعیت قطب های مغناطیسی را تشخیص می دهند.
با داشتن یک رفرنس یکپارچه ، یک انکودر چرخشی مطلق به طور ذاتی قادر به ارائه فید بک با کیفیت بالاتر است.
مزیت های انکودر های مطلق :
- وضوح و جهت گیری کلی بالاتر
- عملکرد بهتر به دلیل صرف زمان کمتر
- دقیق حرکت در امتداد چند محور
- تشخیص پروتکل های خروجی چندگانه برای یکپارچه سازی الکترونیک بهتر
- ریکاوری بهتر از خرابی سیستم
مزایای انکودر های absolute :
- حفظ و به یادآوری موقعیت بعد از خاموشی دستگاه و تداوم مانیتورینگ موقعیت
- امکان تعیین موقعیت ماشین و امکان ذخیره سازی دیتا الکترونیک
- امکان استفاده از گزینه های چند گانه مانند » analog , Ethernet , fieldbus, parallel , serial
- استفاده از اندازه گیری نوری و مغناطیسی
- انکودر های مطلق دارای رزولوشن 16 بیت و یا 65.536 پالس در هر چرخش دارند (PPR)
مزایای انکودر های incremental :
- مناسب برای شمارش پالس های ساده یا مانیتورینگ فرکانس هایی همچون سرعت ، جهت و موقعیت
- مرقون به صرفه و مکانیزم ساده نسبت به انکودر های مطلق
- اندازه گیری مغناطیسی
- انکودر های INCREMENTAL ( افزایشی) دارای رزولوشن 50.000 PPR)PULSE PER REVOLUTION)
جهت مشاهده کاتالوگ محصول به انتهای صفحه مراجعه کنید.
مشخصات محصول
| مدل | E50S8-1024-3-T-1 |
| گارانتی | گارانتی اصالت و سلامت فیزیکی کالا |
| تعداد پالس انکودر | 1024 |
| نوع عملکرد انکودر | افزایشی (incremental) |
| ساختار انکودر | نوری (optical) |
| ولتاژ ورودی انکودر | 5-24 ولت |
| قطر خارجی انکودر (میلیمتر) | 50 |
| قطر شفت (میلیمتر) | 8 |
| نوع انکودر | شفت (shaft) |
| نوع خروجی انکودر | T (توتم پول) |
| تعداد سیگنال خروجی انکودر | 3 |
| سرعت (RPM) | 5000 |
| وزن | 275 گرم |
تفاوت انکودر مطلق و انکودر افزایشی: ABSOLUTE & INCREMENTAL ENCODER
تفاوت انکودر مطلق و انکودر افزایشی، یکی از موضوعات مهم در انتخاب انکودر میباشد. انکودر افزایشی ارزانتر از انکودر مطلق است.
انکودر افزایشی Incremental Encoder
تفاوت انکودر مطلق و انکودر افزایشی، یکی از موضوعات مهم در انتخاب انکودر میباشد. در انکودر افزایشی به ازای گردش اینکودر، سیگنال و پالس را به کنترلر ارسال کرده و به میزان این پالسها در زمان، میزان سرعت و جابهجایی، محاسبه میشود. برای حصول عملکرد اینکودر افزایشی با بواسطه کوپلینگ به محور گردش اتصال کنیم تا میزان حرکت را کنترل کند. اما در انکودر افزایشی، نمیتواند موقعیت فعلی خود را تشخیص دهد. بنابراین به محض قطع تغذیه یا کنترلر، شمارش را از ابتدا انجام میدهد. این امر موجب شده تا نسبت به انکودرهای مطلق، ارزانتر باشد.
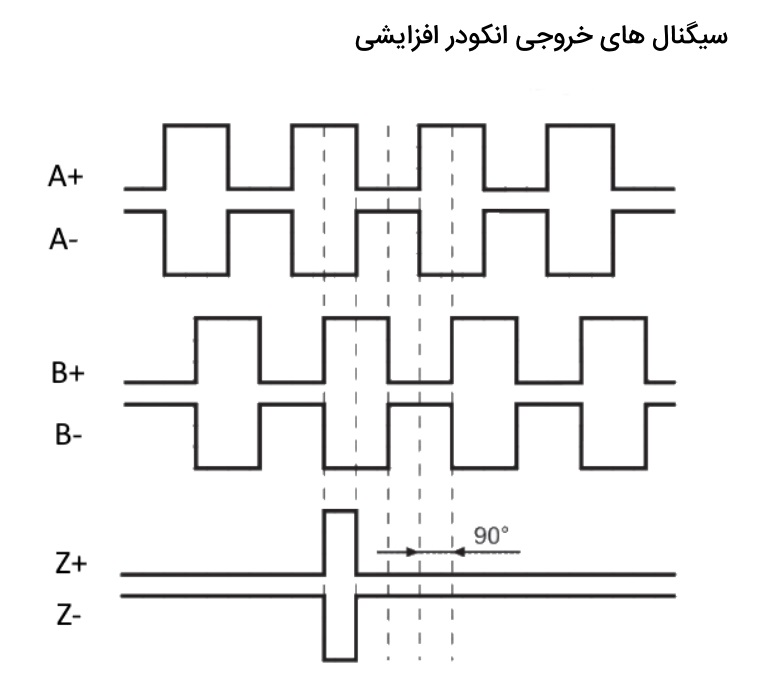
در اینکودر incremental جهت اندازهگیری و تعیین ميزان جابهجایی، جهت و زاویه حرکت، از دو کانال خروجي A و Bبه عنوان سیگنال های اصلی و یک خروجي Z براي نقطه مرجع استفاده میشود. با توجه به ویژگی ذکر شده در انکودر افزایشی، دستگاههایی این نوع اینکودر استفاده میکنند. که نیاز دارند برای تعیین موقعیت در ابتدای فرآیند، به کانال Z رفته، تا جابهجایی جدید نسبت به نقطه شروع انجام شود. بنابراین اندازگیری موقعیت زاویهای، لحظهای انجام میشود. پس هنگام رخداد خطا در شمارش، ادامه شمارش هم به علت فقدان اطلاعات از موقعیت مطلق، دچار اشتباه میشود. به علت قیمت پایینتر، در صنعت بیشتر رایج است. و پهنای باند اینکودر کوچک است، به علت کمبود خروجی برای ارتباط با میکرو کنترلر.
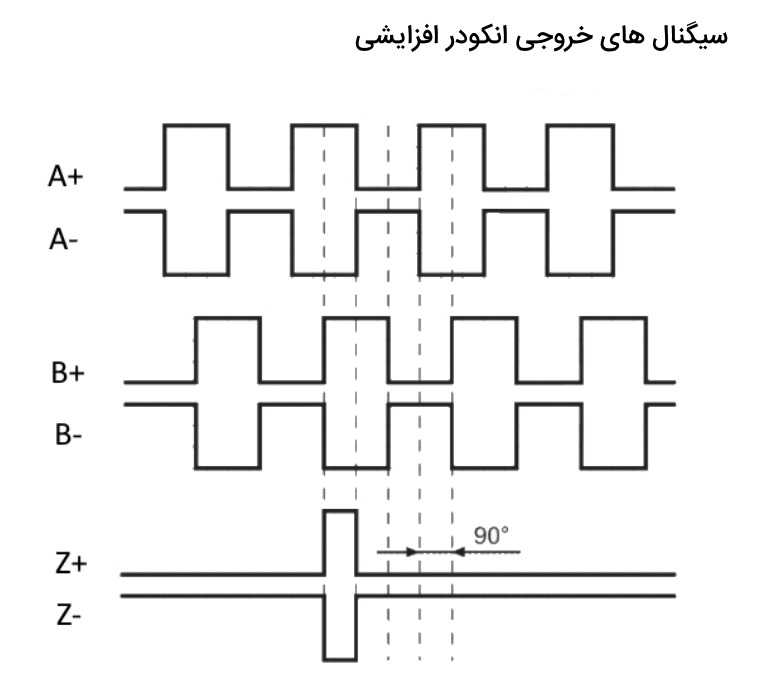 سیگنال های خروجی انکودر افزایشی
سیگنال های خروجی انکودر افزایشی
انکودر مطلق (Absolute Encoder)
در انکودرهای مطلق، هر موقعیت دارای یک کد باینری یونیک و متفاوت است. هر کد باینری یا BCD یا گری، نشان دهنده زاویه انکودر از صفر تا 360 درجه است. بسته به تعداد سنسورهای گیرنده یا فرستنده و لایههای دیسک انکودر، تعداد طول رشته کد باینری وجود دارد. بنابراین تجهیزاتی در صنعت نیازمند اینکودر مطلق میباشند که، نیاز به حرکت از نقطه شروع هنگام قطع منبع تغذیه یا کنترلر ندارند.
در انکودر نوری مطلق، میزان رزولوشن به کمک بیتهای خروجی مشخص میشود. زیرا برای کد گریها، فقط یک بیت در یک زمان تغییر میکند. پس نیازی به کانال Z یا نقطه مرجع وجود ندارد، و دارای پهنای باند بزرگتر میباشد.
 خط کشي صفحه مدرج يک انکودر 4 بيتي
خط کشي صفحه مدرج يک انکودر 4 بيتي
موقعیت شفت در انکودر مطلق به صور دقیق و بدون نیاز به نقطه مرجع اعلام میشود، و جز مزیت اینکودر مطلق محسوب میشود. تعیین موقعیت برمبنای شمارش بیت دیسک نوری تعیی شده، زیرا موقعیت به صورت یونیک میباشد. از معایب انکودر absolute، قیمت بالای آن است. از مشکلات دیگر آن دیکود کردن است، زیرا این انکودرها همواره پالس میدهند، برخلاف اینکودر افزایشی که فقط در هنگام شروع حرکت، پالس میدهد.
 مقایسه بین یک انکودر افزایشی با مطلق با یک رزولوشن
مقایسه بین یک انکودر افزایشی با مطلق با یک رزولوشن
فروش انکودر
راد الکتریک بین الملل یاران، دارای نمایندگی بامر، نمایندگی کوبلر و نمایندگی رادیو انرژی، انواع انکودر را در در مدلهای روتاری انکودر، انکودر خطی با توجه به نیاز گسترده سازمانها، امکان فروش انکودر را فراهم آورده است. لذا جهت هرگونه مشاوره خرید انکودر، با کارشناسان ما تماس بگیرید.
جدول مقایسه ای تفاوت انکودر مطلق و انکودر افزایشی
انکودر افزایشی | انکودر مطلق |
هر زمانی که شفت در یک زاویه خاص گردش میکند، یک سیگنال خروجی تولید میکند. | دارای کد یونیک برای موقعیت شفت که هر کد بیان کننده موقعیت دقیق انکودر مطلق است. |
| باید در تمام مدت کارکرد دستگاه روشن باشد. | فقط وقتی نیاز به خوانش کد دارد، روشن میشود. |
قیمت ارزانتر | قیمت بالاتر |
هر زمانی که منبع تغذیه خاموش شود، یا دچار خطا میشود یا خوانش موقعیت باید از اول آغاز شود. | هر زمانی که قطع شود، اطلاعات موقعیت قبلی و فعلی را فراموش نمیکند. |
تفاوت ساختاری بین انکودر افزایشی و انکودر مطلق
با توجه به بررسی تفاوتهای ساختاری انکودر افزایشی و انکودر مطلق، دو نوع پروتکل در خروجی اینکودرها وجود دارد: خروجی الکتریکی انکودر با پروتکلTTL (Transistor Transistor Logic) و خروجی الکتریکی انکودر با پروتکل HTL (High Threshold Logic ) میباشد.
ورودی/خروجی انکودر افزایشی
خروجی ولتاژ Voltage Output
اولین نوع پروتکل خروجی انکودرها محسوب شده ولی اکنون منسوخ شده است. با توجه به تصویر زیر، خروجی توسط یک ترانزیستور NPN فرستاده میشود:
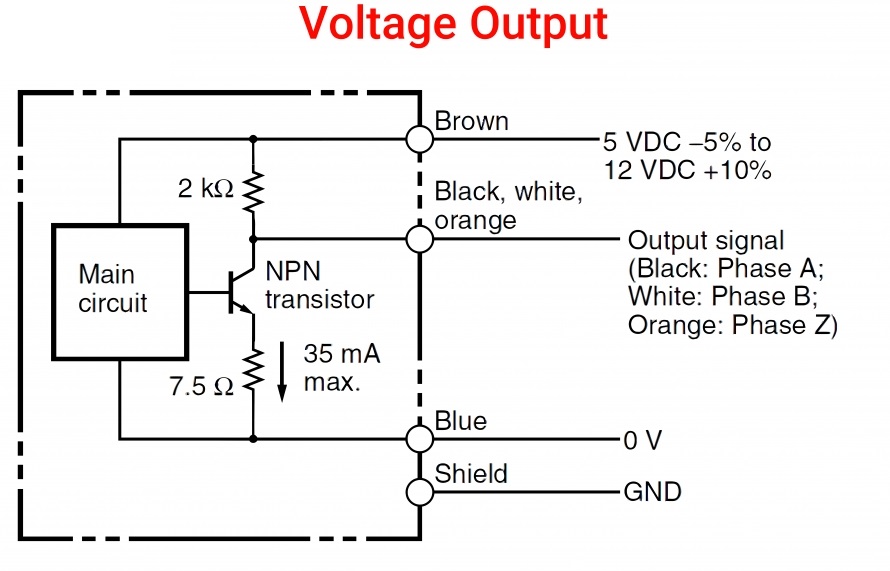 پروتکل خروجی ولتاژ
پروتکل خروجی ولتاژ
خروجی مکمل Complementary Output
در برخی موارد این پروتکل به، Totem-Pole یا Push-Pullشناخته میشود. در واقع خروجی این مدار ترکیبی از دو ترانزیستور PNP وNPN با خروجی مدلSinking و Sourcingمیباشد. در زمانیکه که سیگنال خروجی در وضعیت کمترین (Low) اگر جریان به صورت Sinking باشد یعنی سیگنال خروجی در وضعیت کم و اگر جریان به صورت Sourcing باشد یعنی سیگنال خروجی در وضعیت بالا قرار دارد. که نام دیگر این خروجی Pull-Up است. اغلب این نوع خروجی الکتریکی در AVR ها، PLC ها و مدارات الکترونیکی بکار میرود.
خروجی push-pull در بسیاری از کشورا رایج است، ولی مشکل نویزپذیری دارد. زیرا معکوس کانالهای A،B و Z را نداشته و نویز افزایش مییافته است. که این مشکل امروزه توسط شرکتهای تولیید کننده انکودر، بامر Baumer آلمان حل شده است.
این نوع خروجی در اروپا بسیار محبوب بوده و در آمریکا هم استفاده زیادی از آن می شود ولی مشکل اصلی آن نویز پذیری آن می باشد. بدان معنا که قبلا این پروتکل فقط امکان ارائه سه کانال A ، B و Z را داشته و امکان ارائه معکوس ها میسر نبوده است. لذا نویز به روی آن بسیار تاثیر گذار بوده است. اما در حال حاضر شرکت های معروف مانند انکودر بامر Baumer، انکودر های خود را به همراه هر 6 کانال تولید و ارائه می نمایند. پروتکل HTL توانسته جایگزین مام خروجیهای ذکر شده از جمله NPN Open-Collector، PNP Open-Collector، Complementary Output ، Pull-Up و Push-Pull میباشد. سطح سیگنال این پروتکل برابر با ولتاژ ورودی Vss و مقدار 8 الی 30 ولت میباشد.
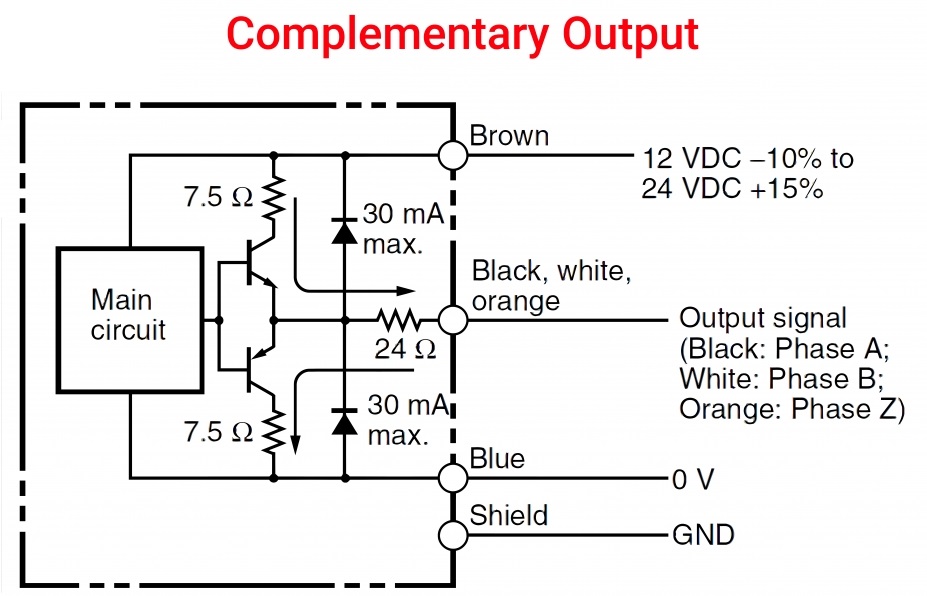 پروتکل خروجی مکمل
پروتکل خروجی مکمل
خروجی خط درایو Line Drive Output
این نوع خروجی که اصلاح شده پروتکل Push-Pull میباشد با نام Differential Line Driver هم شناخته میشود. این خروجی در واقع سیگنال معکوس هرکدام از خروجیها رو نیز دارد. لذا نویززپذیری کمی دارد و در برابر ارتعاشات و اختلالهای محیطی، استقاومت بالاتری دارد. اما به علت فاصله بین انکودر و کنترلر، دارای افت ولتاژ میباشد. سطح ولتاژ در این پروتکل خروجی، 5 ولت مطلق و یا 8 الی 30 ولت است. جایگزین مناسب این خروجی، پروتکل TTL است که سرعت پاسخ دهی بیشتری دارد و ولتاژ بدون نوسان را به کنترلر تحویل میدهد.
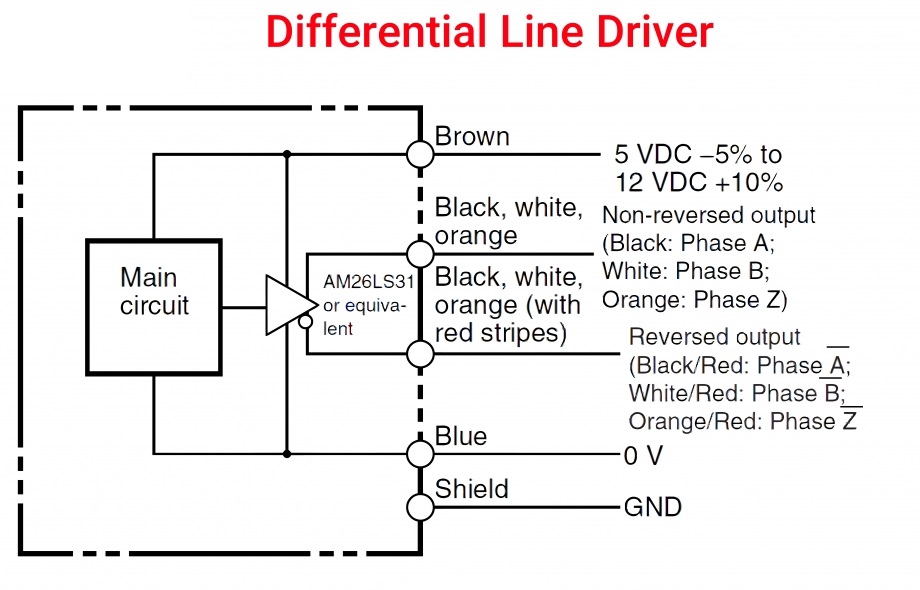 پروتکل خروجی خط درایو
پروتکل خروجی خط درایو
ورودی/خروجی انکودر افزایشی
خروجیOpen Collector به صورت NPN یاPNP
این پروتکل اگر جریان Sinking باشد، یعنی جریان از مدار خروجی متصل و در عین حال تامین کننده باشد، در میکروکنترلرها، مدارات الکترونیکی و PLC بکار میرود. بنابراین مانند پروتکل HTL دارای ولتاژ 8 الی 30 ولت در مدل انکودر افزایشی است.
 پروتکل خروجی ترانزیستوری
پروتکل خروجی ترانزیستوری
خروجی خط درایو Line Drive Output
این پروتکل درست مشابه نوع افزایشی انکودرها، یعنی پروتکل TTL با همان سطح ولتاژ میباشد.
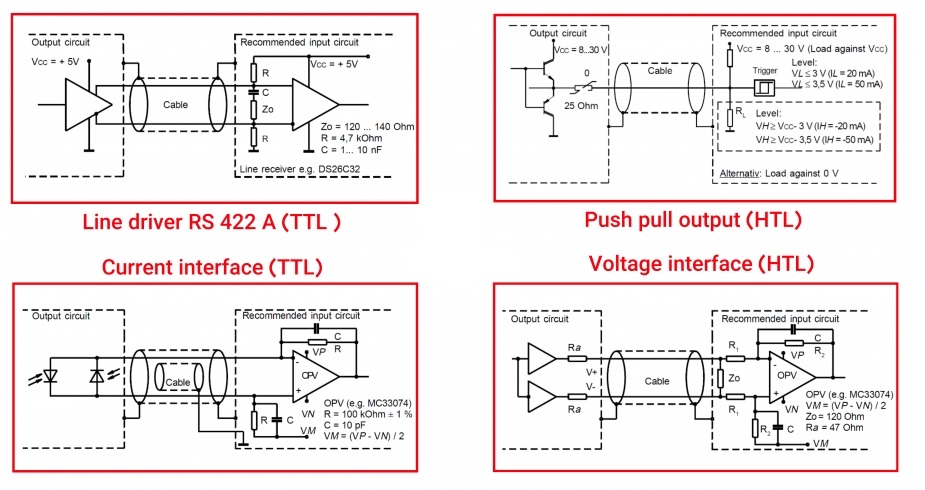 تمامی مدارات خروجی انکودرها در یک نگاه
تمامی مدارات خروجی انکودرها در یک نگاه
مشاوره خرید انکودر
دیدگاه خود را بنویسید